



Description
Note: This is tinyMixer v2.0 with updated firmware to accommodate the recent incompatibility with FS-iA6 receivers and BLHeli ESCs. All is well and ready to tinyMix all the things!!
Don't like 2-stick "tank" steering? Need a stick free for weapon control? Using a gyro for drive stabilization?
The tinyMixer combines the "left/right" (Aileron) and "up/down" (Elevator) channels of a single stick into two individual drive channels.
This allows you to maneuver the robot with just one thumb, leaving the other open for weapon control.
Invert Function: If your robot gets flipped upside down but is still drivable, you can invert the controls and drive it as if it were still right-side-up. Alternatively, you can invert while right-side-up and make the back of the robot into the front. This can be useful if your robot has both a weapon and a wedge and you want to attack with the other.
Radio Failsafe: All* combat events require a robot to cease movement when radio contact is lost. The cheaper channel mixers do NOT do this.
(*There are still a few events that allow the lowest weight classes to compete without failsafe, as long as the robot does not have an active weapon. Ask your event organizer.)
Features:
- Ultra-compact and lightweight. Smallest full-functioned mixer on the market!
- Radio failsafe makes this mixer safe and legal for all combat robot competitions.
- Can set to either Mixed or No-Mix (2-stick, aka "Tank") mode, with Invert functionality on both.
- Bright blue status LED can double as power indicator.
- Read the tinyMixer review in SERVO Magazine!
Specifications:
- Operating voltage: 5-12V (ex. tinyESCs provide 5V, even though they can be run from a 36V battery)
- Size including pins: 2.5 x 0.9 x 0.6cm (0.98x0.36x0.25”)
- Weight with wires: 3.0grams (0.11oz)
Installation:
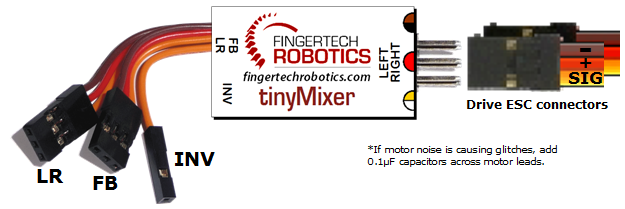
- Connect the right drive ESC to RIGHT, and left drive ESC to LEFT (observing polarity).
- Mixed Mode: Connect FB to ELEVATOR (CH2), LR to AILERON (CH1), and INV to GEAR (CH6) (or whichever is convenient).
- No-Mix Mode: Connect FB to ELEVATOR (CH2), LR to THROTTLE (CH3), and INV to GEAR (CH6) (or whichever is convenient).
- (*HK-T6A radio channels in green)
To not use the invert function, simply leave the single INV wire unconnected. To later use it, power must be cycled after the connector is plugged in.
Invert can also be used to make the back of your robot into the front. For example, if you want to attack with the rear wedge instead of the front weapon.
Some large or cheap motors can send electrical noise along the signal wires. Add a 0.1uF capacitor across each motor's terminals to keep the tinyMixer from seeing this noise as false signals.
Calibrating (v1.7):
- The tinyMixer needs an accurate center position for Invert to function properly.
- To calibrate, plug the INV wire into a Ground pin on your receiver then power on the tinyMixer. It will begin to flash.
- Center your transmitter trims and sticks and power it on.
- Remove the INV wire from the ground pin. The LED will go solid and save the center position. Cycle the robot power to reboot.
- *If your ESCs need to be calibrated, do so after the tinyMixer.
Operation:
- Ensure transmitter stick and trims are centered when powering on. These are recorded each session and used for the Invert function. [Pre-v1.7 only. v1.8+ have Calibration.]
- • To activate Invert, move the INV channel above 70%. This reverses the Front/Back direction while leaving the Left/Right as-is, keeping the front of the robot at the front when upside down.
- Normal Driving: Led solid-on
- Inverted Driving: LED flashing
- Signal loss (failsafe): LED slowly blinking (1 short flash per second)
Switching between Mixed/No-Mix mode:
- The tinyMixer is shipped in Mix mode by default. It can be switched between Mix and No-Mix (two-stick, aka "Tank") driving mode. (Invert can be used in either mode.)
- With the LR wire disconnected, push the stick to the top and hold (the LED will flicker). After 4 seconds the LED will blink repeatedly to indicate No-Mix mode, or go solid for Mixed mode. The robot's power will now need to be cycled to reboot into the new mode. (Don't forget to now plug in the LR channel).